Vibrotaktile Displays für die chirurgische Navigation
Vibrotaktile Displays für die chirurgische Navigation
Hintergrund und Problem / Bedarf
Während der chirurgischen Navigation werden die Abweichungen zwischen vorgeplanter Soll- und aktueller Ist-Position über einen Monitor visualisiert (bspw. Stealth Station von Medtronic, Vector Vision von Brainlab). Diese optische Rückkopplung zwingt den Chirurgien den Blick ständig zwischen dem Operationsgebiet und dem Monitor zu wechseln. Besonders bei sehr dynamischen Aufgaben, wie z.B. Fräsungen, kann es zu Ungenauigeiten kommen, da der Wechsel zu lange dauert.
Zur Verbeserung der Qualität besonders von dynamischen Aufgaben wurden Robotersysteme eingeführt (RoboDoc von ISS, SurgiScope von Elekta, etc.). Weiterentwicklungen wie Telemanipulationssysteme (daVinci von Intuitive Surgical) oder interaktive Systeme (Hein and Lüth, 2001) ergänzen die Rückkopplung an den Chirurgen um den haptischen Kanal. Die Gegenkraft des Knochens während einer Fräsung kann dem Chirurgen durch eine Kraftwirkung des Roboters auf den Chirurgen rückgekoppelt werden.
Die vibrotaktile Rückkopplung durch so genannte Taktoren (bspw. Motoren, die Vibrationen auf der Haut erzeugen) wurde bereits als zusätzlicher Informationskanal zwischen einem technischem Assistenzsystem und dem Nutzer benutzt. Anwendungen waren bisher Systeme für das Biofeedback (Weissgerber et al., 2004), die Kommunikation mit Tauben und Blinden (Phillips et al., 1999) und die Richtungsanzeige für Piloten und Astronauten (Rupert, 2000). Van Erp (2005) beschrieb einen Ansatz für die Navigation von Personen mit Taktoren am Torso. Es wurde gezeigt, dass die Testpersonen die Stimuli am Torso als Richtungsanzeigen interpretieren konnten.
Ansatz
In diesem Projekt wird die Anwendung der vibrotaktilen Rückkopplung für die chirurgische Navigation evaluiert. Im ersten Ansatz wurden die Taktoren an nicht-störenden Positionen auf der Rückseite der Hand platziert und die Hand bzw. das Instrument mit Lokalisatoren für die Positionsbestimmung ausgestattet. Nach der Berechnung der Differenz zwischen Soll- und Ist-Position werden Stimuli auf der Hand erzeugt, so dass der Nutzer die notwendige Korrekturbewegung direkt erfassen kann. 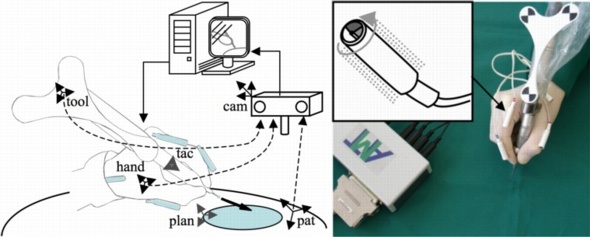
Die folgenden Fragestellungen werden adressiert:
- Modellierung und Reglerentwurf für vibrotaktile Navigation,
- Genauigkeit und dynamisches Verhalten bei der Positionierung von Instrumenten,
- Taktoranordnungen und Interpolation zwischen Taktoren,
- Zeitvariante Effekte (Lernkurven, Sättigung, Aufmerksamkeit)
- Abweichungen zwischen Hand-internen und externen Koordinatensystemen.
Kooperationen/Förderung
Die Arbeiten werden im Rahmen des Internationalen Graduiertenkollegs Neurosensory Science and Systems (Sprecher: Prof. Dr. Dr. Birger Kollmeier) durchgeführt.
Publikationen
Mungwe, S.; Hein, A. (2011): The Need for Adaptation in Vibrotactile Surgical Navigation. Proceedings of the 2011 SCATh Joint Workshop on New Technologies for Computer/Robot Assisted Surgery, July 11-13, 2011, Graz, Austria, pp. 1-4.
Mungwe, S.A.; Hein, A. (2011): Fuzzy Controller for Positioning Tasks in Tactile Surgical Navigation. International Conference on Control, Robotics and Cybernetics (ICCRC 2011). New Delhi, India, March 19-20, 2011, pp. V1-289-292.
Mungwe, S.A.; Hein, A. (2010): Accuracy Analysis in Positioning and Milling with a Tactile Surgical Navigation System. 1st International Conference on Applied Bionics and Biomechanics- ICABB-2010, Venice, Italy, October 14-16, 2010, 6 pages
Mungwe, S.; Hein, A. (2010): Adaptive Controller for a Tactile Surgical Navigation System. Proc. of the 7th IASTED Int. Conf. Biomedical Engineering (BioMED 2010), Feb., 17-19, 2010 Innsbruck, Austria, pp. 160-163.
Brell, M. (2009): Eine vibrotaktile Mensch-Maschine-Schnittstelle für chirurgische Applikationen. Dissertation an der Universität Oldenburg. Fortschr.-Ber. VDI Reihe 17 Nr. 276. Düsseldorf: VDI Verlag 2009.
Brell, M.; Hein, A. (2009): Tactile guidance in multimodal computer navigated surgery. IEEE Potentials, Volume: 28 Issue:4, pp. 30 - 35
Isken, M.; Brell, M.; Hein, A. (2008): Kabellose Signalübertragung für taktile chirurgische Navigation. 7. Jahrestagung der Deutschen Gesellschaft für Computer- und Roboterassistierte Chirurgie e.V., Germany, Leipzig, September 24-26, 2008
Hein, A.; Brell, M. (2008): Multimodale Mensch-Maschine Schnittstellen für die chirurgische Navigation. 39. Jahrestagung der DGMP, Germany, Oldenburg, September 10-13, 2008, in print.
Brell, M.; Roßkamp, D.; Hein, A. (2008): Fusion of Vibrotactile Signals used in a Tactile Display in Computer Aided Surgery. EuroHaptics 2008, Madrid, Spain, June 11-13, 2008, in print
Brell M., Hein A.: Multimodal Navigation with a Vibrotactile Display in Computer Assisted Surgery. In: Lee, S.; Suh, I.H.; Kim, M.S. (Eds.): Recent Progress in Robotics; Viable Robotic Service to Human. Edition of Selected Papers from the 13th International Conference on Advanced Robotics (ICAR 2007). Lecture Notes in Control and Information Sciences (LNCIS), Volume 370, , ISBN 978-3-540-76728-2, Springer (2008) 331 - 343.
Brell, M.; Hein, A. (2007): Voruntersuchung zur vibrotaktil geregelten Instrumentenführung für die multimodal unterstütze Navigation. 6. Jahrestagung der Deutschen Gesellschaft für Computer- und Roboterassistierte Chirurgie (CURAC), Karlsruhe, 11.-13. Oktober 2007, pp. 173-176.
Brell, M.; Hein, A. (2007): Positioning Tasks in Multimodal Computer Navigated Surgery. IEEE MultiMedia Magazine - Special Issue on Multimedia Signal Processing and Systems in Healthcare and Life Sciences, Oct.-Dec. 2007, pp 42-51.
Hein A., Brell M. (2007): conTACT – A Vibrotactile Display for Computer Aided Surgery. Second Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (WHC2007), Tsukuba, Japan, March 22 – 24, 2007, pp 531-536.
Hein, A., Brell, M. (2006): Navigationseinrichtung und Navigationsverfahren für ein Werkzeug, insbesondere ein medizinisches Instrument. DE-Patentanmeldung 102006045100.7; Offenlegung: 10.04.2008.