Technik
Projektmitglieder
Website Verantwortliche
Technik
In der Projektgruppe werden verschiedene technische Komponenten verwendet. Diese reichen von bekannten Virtualisierungen mit Docker, bishin zu fachspezifischen Simulationstools wie CARLA.
In der Projektgruppe wird gezielt ROS, ADORe und CARLA genutzt.
- ROS steht für Robot Operating System. Es handelt sich dabei um eine Open-Source-Plattform, die speziell für die Entwicklung von Robotersoftware konzipiert ist.
- CARLA ist eine Open-Source-Simulatorplattform für autonome Fahrzeugforschung und -entwicklung.
- ADORe (Autonomous Driving on Real Roads) ist ein Forschungsprojekt des DLR (Deutsches Zentrum für Luft- und Raumfahrt), das sich auf die Entwicklung autonomer Fahrfähigkeiten für Fahrzeuge im realen Straßenverkehr konzentriert.
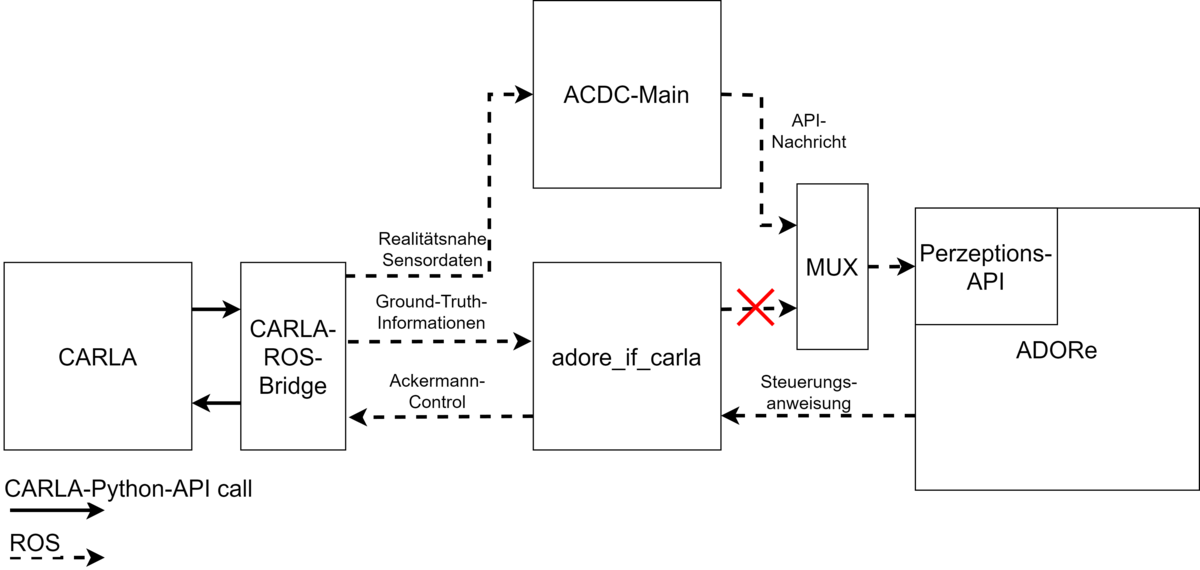
Für eine Erreichung der erarbeiteten Ziele und Anforderungen ist eine geeignete Architektur notwendig. Durch den Einsatz von ADORe ist es notwendig, die von der Projektgruppe entwickelte Lösung in ein bestehendes System zu integrieren.