Prototypen und Ergebnisse
Projektmitglieder
Website Verantwortliche
Prototypen und Ergebnisse
Anhand der Schnittstellen der ADORe Perzeptions API wurden verschiedene Arten von Prototypen ausarbeitet. Dabei zunächst drei Prototypen genauer untersucht worden: die Lokalisierung, die Verkehrssteuerung und die andere Verkehrsteilnehmer.
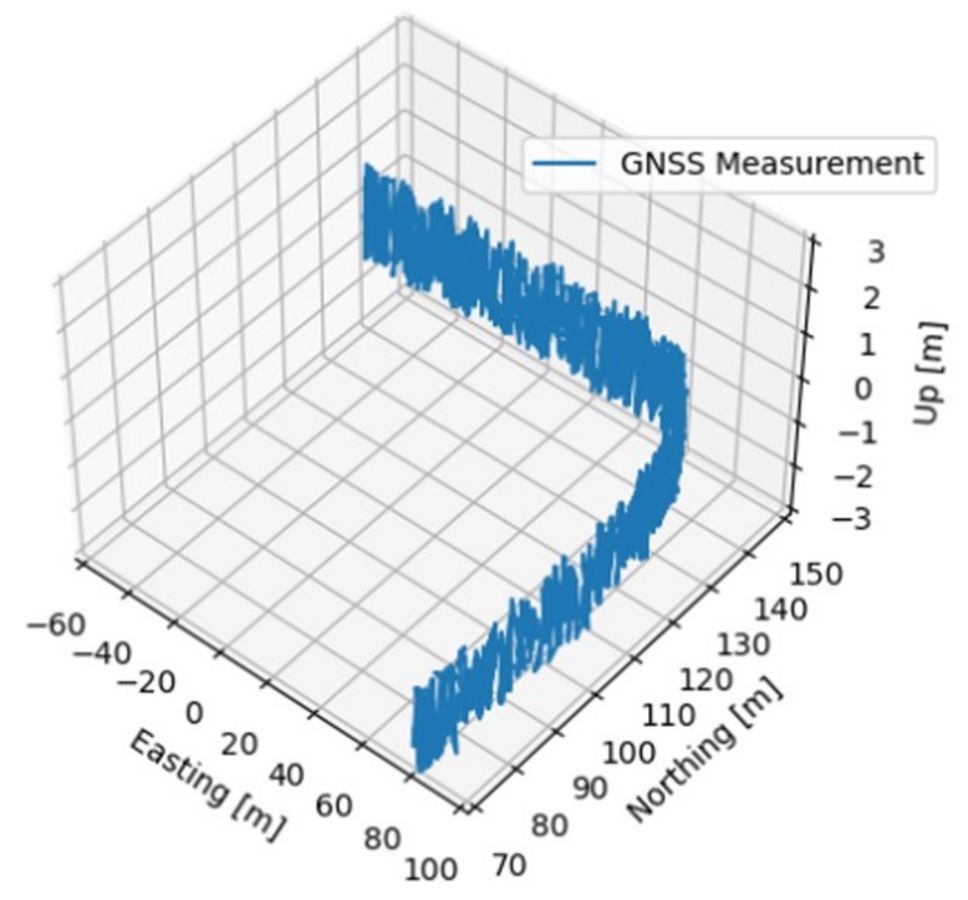
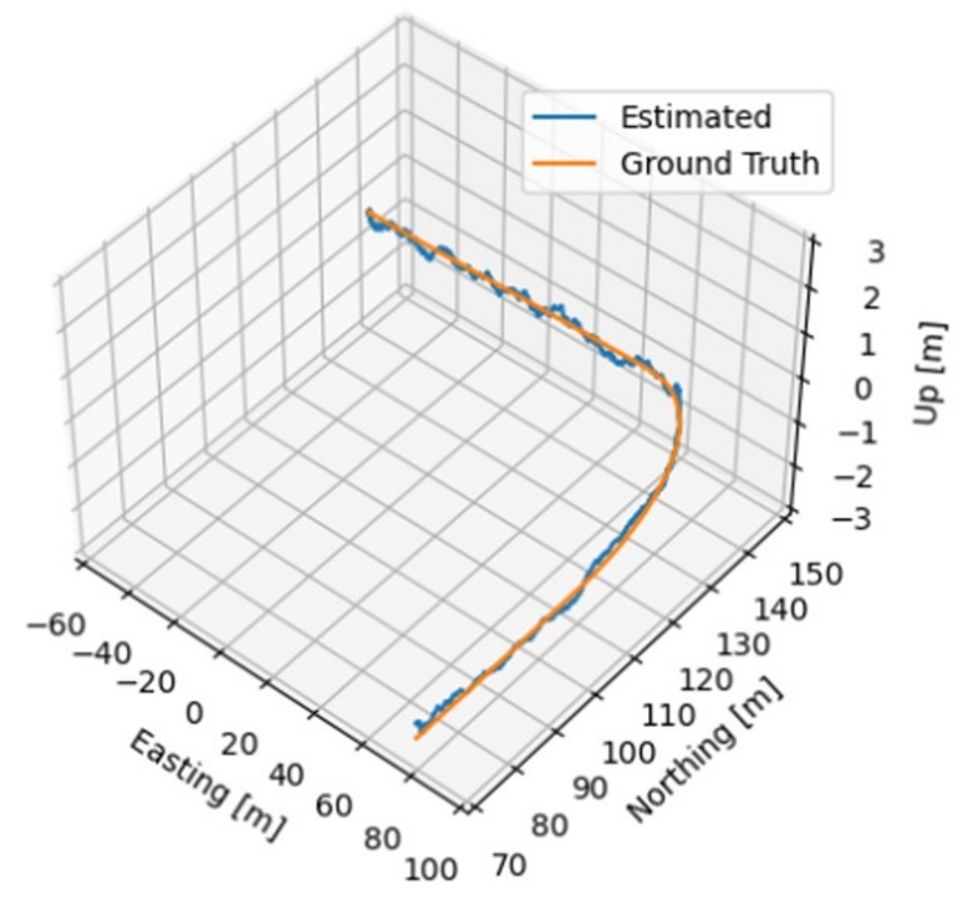
Bei der Lokalisierung werden die Positionsinformationen des Ego-Fahrzeuges umgesetzt. Dabei ist das übergeordnete Ziel dieses Prototyps die Übermittlung von realitätsnahen Sensor-Positionsinformationen aus der Simulation an ADORe. Dieser Prototyp ist die Basis des gesamten Systems.
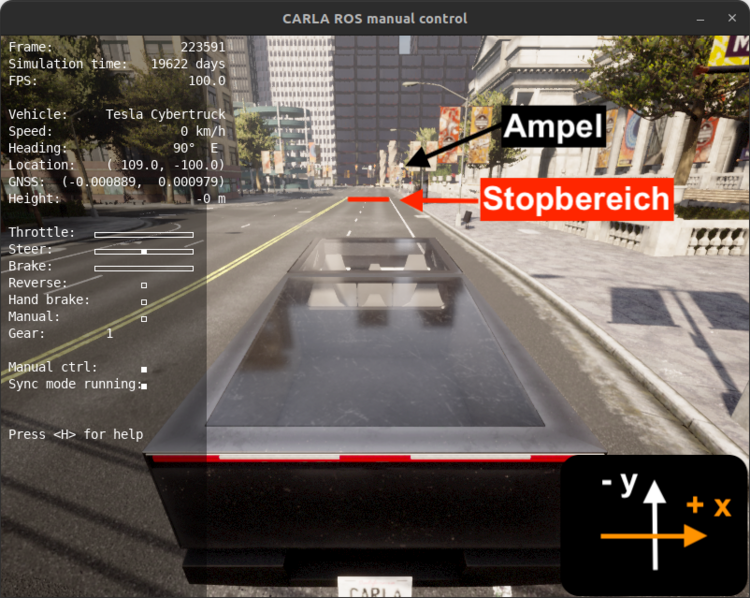
Bei der Verkehrssteuerung sollen innerhalb der Simulation die Verkehrssteuerungseinrichtungen, wie Ampeln und Schilder, zuverlässig erkannt werden. Das aktuelle Ziel beschränkt sich dabei die Übermittlung von Ampeldaten an ADORe.
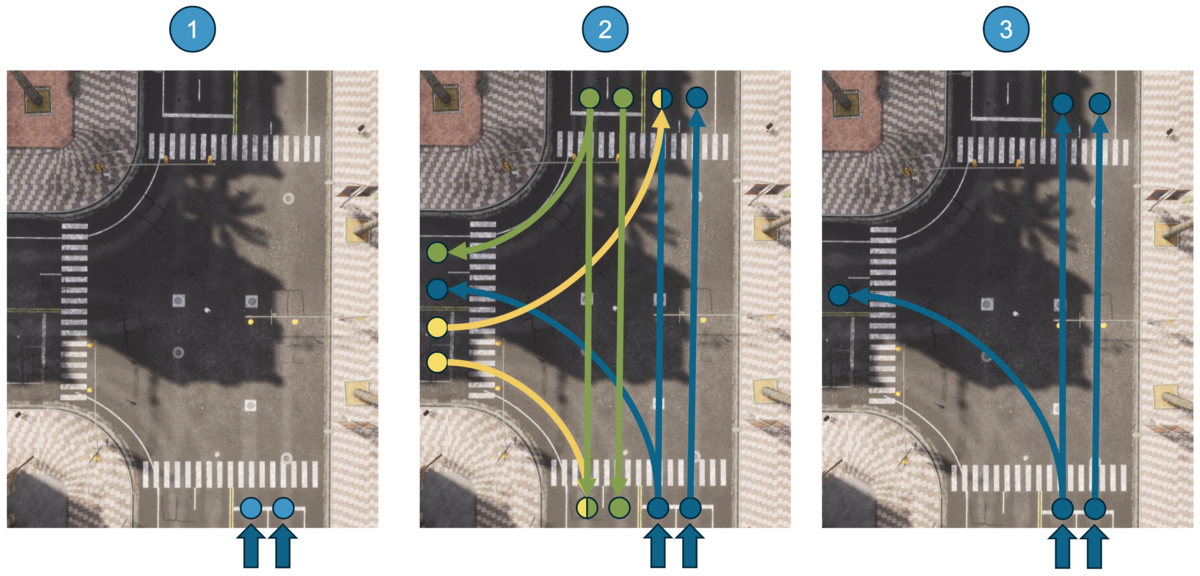
Bei den Verkehrsteilnehmern müssen alle weiteren Verkehrsteilnehmer im Umkreis des Ego-Fahrzeugs klassifiziert und lokalisiert werden, damit die Trajektorie geplant werden kann. Das übergeordnete Ziel dieses Prototyps ist es anhand des eigen erstellten Sensor-Setups die anderen Verkehrsteilnehmer zu erkennen.